泊车辅助
泊车辅助APA(Advanced Parking Assist)通过摄像头、超声波雷达、激光雷达*等传感器感知车位及障碍物信息,辅助驾驶员将车辆泊入或泊出车位。APA功能默认开启。
APA可支持车位线清晰、完整,且光照条件良好的平行、垂直、斜列车位,同时支持一些没有车位线,但车位区域一侧或两侧有其他车辆的空间车位。此外,在没有车位线场景下,您还可以使用自定义泊车。使用APA过程中,最高泊车速度为5km/h,需要驾驶员始终在驾驶位并系好安全带。
功能设置
您可以在中控屏点触
HUAWEI ADS >
 > 辅助驾驶 > 泊车辅助,设置泊车速度参数(较慢、适中、较快)。
> 辅助驾驶 > 泊车辅助,设置泊车速度参数(较慢、适中、较快)。
APA为辅助驾驶功能,不能完全替代驾驶员的驾驶行为,驾驶员驾驶车辆泊车过程中,应始终保持警惕,密切注意周围可能的各种危险情形,确保安全驾驶否则可能会引发事故,甚至导致严重的财产损失、人身伤害或死亡。
-
APA无法取代驾驶员目视检查,禁止过度依赖APA功能。
-
APA泊车过程中,请注意防止被转速过快的方向盘打到手。
-
APA系统存在探测盲区,在出现风险时可能不警报、误警报或延迟警报,不能取代驾驶员对周围环境的观察,禁止过度依赖APA系统的警报信息。
-
在特别狭窄的停车位(例如狭窄街道、墙角或拐角处的车位),传感器性能会受到限制,导致车辆和周围物体发生碰撞风险。
-
APA泊车过程中,如遇障碍物(如轮挡等)存在剐蹭前悬风险时,系统会暂停泊车并在中控屏泊车界面进行提示。请确认无剐蹭风险后,再进行泊车。
-
使用APA在机械车位泊车时,若车辆顶部有加装行李箱、自行车等物品时,也需驾驶员自行判断车位空间是否可泊,避免发生剐蹭风险。
-
使用APA过程中,请关注周围环境,尤其是儿童、小动物或其他细、尖、矮、悬空的障碍物。当判断可能发生剐蹭或碰撞风险时,请及时轻踩制动踏板接管车辆,避免安全风险。
-
许多不可预见的情况都会影响辅助泊车能力,驾驶员务必牢记APA仅为辅助泊车功能,无法完全替代驾驶员正确操控车辆,驾驶员需随时准备立即接管车辆。
机械车位泊车辅助
APA还支持机械车位泊车,但仅限订阅ADS高阶功能包后可用。
本系列车型分为ADS基础版和ADS超阶版,但仅ADS超阶版支持机械车位。
使用时,请注意机械车位的限高、限宽、限重等约束条件,确保泊车安全。
机械车位泊车辅助将分批逐步释放,具体请以车辆配备的实际功能为准。
-
在机械车位泊车时,请人工判断自车尺寸和重量是否满足车位限定条件。若不满足限定条件,请勿使用机械车位泊车辅助功能。
-
使用APA在机械车位泊车时,驾驶员需自行判断车辆是否处于机械车位地面层,避免车辆掉落风险。
-
若车辆顶部有加装行李箱、自行车等物品时,需驾驶员自行判断车位空间是否可泊,避免发生剐蹭。
-
由于机械车位较窄,泊入时请注意剐蹭风险,必要时请及时接管。
-
请勿在机械车位使用自定义车位的方式泊车。
泊入车位
1.驾驶车辆以小于25km/h的速度缓慢行驶,直至查找到安全适宜的可泊区域后。
2.您可以通过以下任一方式开启中控屏APA泊车界面:
-
轻按方向盘右侧滚轮(已将该滚轮的功能自定义设置为“智能泊车辅助”)。
-
在中控屏 HUAWEI ADS >
> 辅助驾驶 > 全景环视界面中设置为挂R挡默认打开智能泊车辅助界面并刹停车辆后,将车辆挡位切换为R挡。
-
在中控屏360°全景环视界面左上角点触
 。
。
-
从中控屏顶部下滑出控制中心,点触“辅助泊车”。
打开中控屏APA泊车界面查找车位时,如果车速大于25km/h,APA泊车界面将退出。
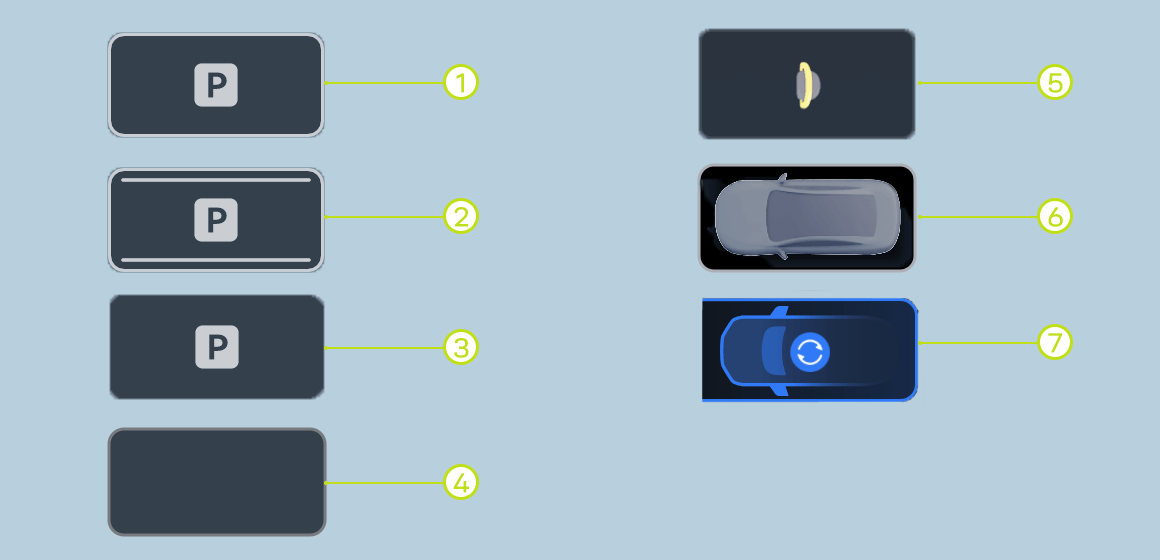
|
序号 |
说明 |
|---|---|

|
车位可泊 |

|
窄车位可泊 |

|
空间车位可泊 |

|
车位不可泊 |

|
地锁车位不可泊 |

|
车位被占 |

|
已选车位 |
3.踩下制动踏板,待车辆完全停稳后,通过以下任一方式,在APA泊车界面上选择可泊车位:
-
点触界面上标注“P”的车位框。
-
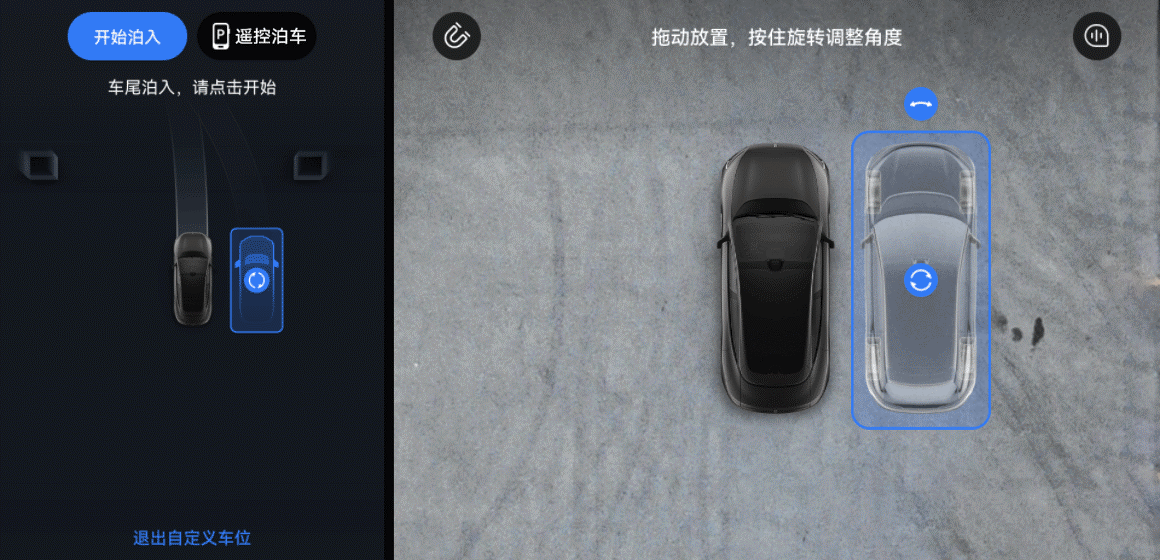
点触界面底部的“自定义车位”,随后在右侧界面上自定义车位位置。
选择车位时,若车位框出现
 ,则驾驶员可点触该图标切换车头或车尾泊入。否则表明当前车位不支持切换泊入方式。
,则驾驶员可点触该图标切换车头或车尾泊入。否则表明当前车位不支持切换泊入方式。


4.确认目标停车位后,踩住制动踏板的同时,点触“开始泊入”。
驾驶员也可根据系统提示选择“靠左”或“靠右”泊入,此方式仅支持车尾朝里泊入,且仅适用于垂直、斜列和空间车位,不适用于平行车位和自定义车位。
5.根据中控屏提示松开制动踏板和方向盘,APA将控制车辆开始泊入。
泊入过程中,驾驶员可通过点触左上角
 ,切换到360°全景环视界面。驾驶员应时刻关注周边环境和车辆状况,确保泊车安全。
,切换到360°全景环视界面。驾驶员应时刻关注周边环境和车辆状况,确保泊车安全。
6.泊车完成后,车辆自动切换至P挡,同时通过语音和泊车界面提示“泊入已完成”。
-
当中控屏显示为地图界面时,驾驶员可以直接在中控屏上选择车位,进行泊车操作。
-
使用APA泊入时,驾驶员可以根据中控屏左下角显示进行泊入位姿切换(仅ADS超阶版支持此段)。
自定义车位
在没有车位线的场景下,您也可以选择“自定义车位”方式完成车位选择:
1.在中控屏泊车界面点触“自定义车位”,右侧视图自车旁将出现与自车平行的白色车位框。
2.通过以下任一方式将自定义车位框放置到安全合适的位置:
-
在中控屏上点触目标位置或拖拽车位框以调整位置,拖动车位框顶部的旋转图标以调整角度。
-
点触
 开启车位吸附功能(当车位框靠近路沿或划线车位等边界目标时,系统会自动调整车位框至合适位置),系统将辅助驾驶员完成车位框位置微调。
开启车位吸附功能(当车位框靠近路沿或划线车位等边界目标时,系统会自动调整车位框至合适位置),系统将辅助驾驶员完成车位框位置微调。
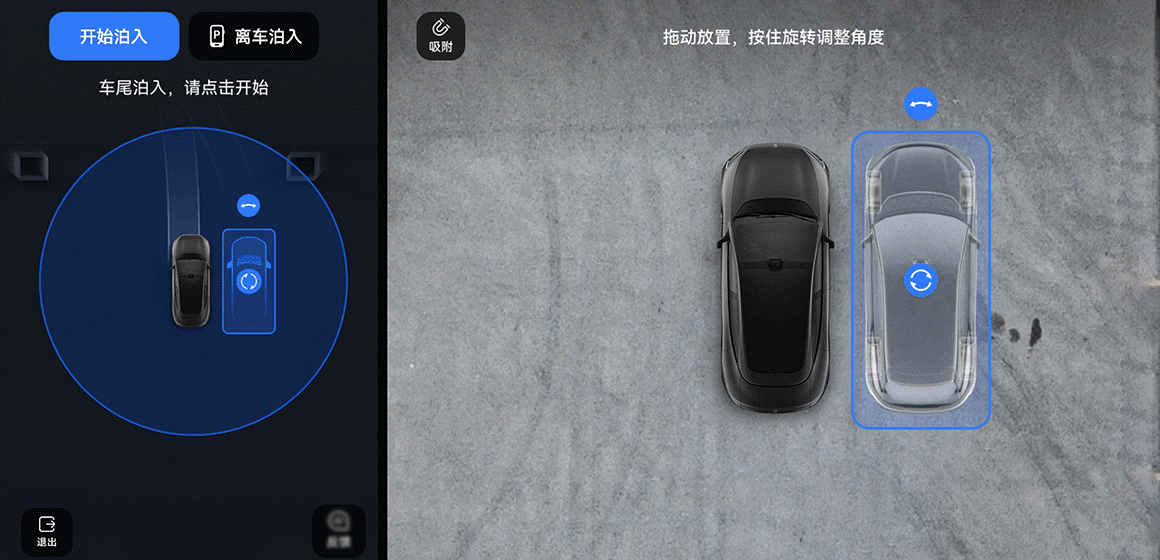
3.调整完毕后,待白色车位框变为蓝色后,表明该车位为可泊车位。如果车位框未变成蓝色,请重新调整车位至合适位置。
-
请勿在机械车位使用自定义车位的方式泊车。
-
使用自定义车位时,应将车位放置到安全合适位置,避免放置在过于狭窄、有其他物体、地面不平整、临近台阶或悬崖,或者其他系统受限场景。
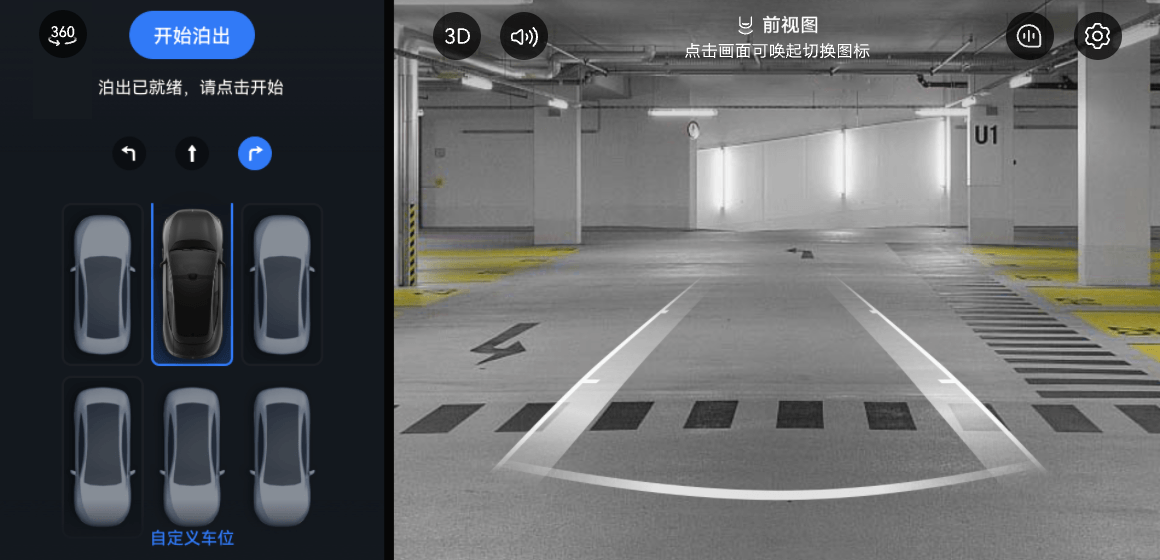
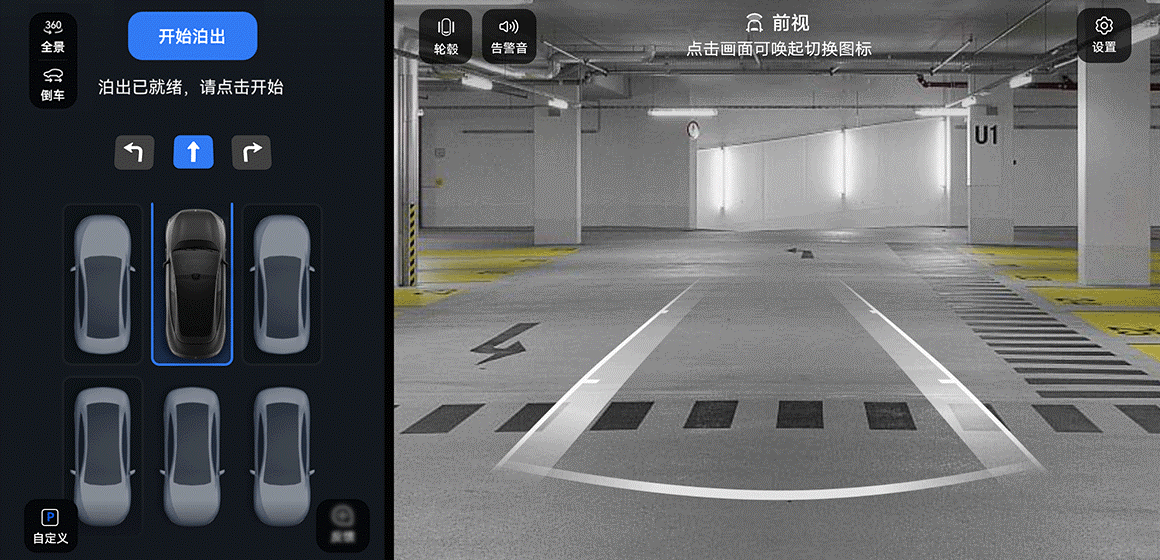
泊出车位
1.启动车辆。
2.您可以通过以下任一方式开启中控屏APA泊车界面:
-
轻按方向盘右侧滚轮(已将该滚轮的功能自定义设置为“智能泊车辅助”)。
-
在中控屏 HUAWEI ADS >
> 辅助驾驶 > 全景环视界面中设置为挂R挡默认打开智能泊车辅助界面并刹停车辆后,将车辆挡位切换为R挡。
-
在中控屏360°全景环视界面左上角点触
。
-
从中控屏顶部下滑出控制中心,点触“辅助泊车”。
3.选择泊出方向。
-
驾驶员选择泊出方向时,需确认泊出方向安全可用,不能违反停车场通行方向。
-
驾驶员选中泊出方向后,未点触“开始泊出”按键就松开制动踏板的情况下,车辆可能发生溜车,请驾驶员及时接管,确保泊车安全。当驾驶员收到“注意溜车”提醒时,应立即踩下制动踏板接管车辆。
泊出过程中,驾驶员应时刻关注周边环境和车辆状况,确保泊车安全。
-
使用APA泊入车辆过程中,如遇距离较近物体即将发生剐蹭或碰撞风险时,您应及时踩下制动踏板,接管车辆,避免安全风险。
-
车辆方向盘转角过大时,可能导致APA无法激活。此时,驾驶员可尝试通过回正方向盘后,激活泊车。
-
为了确保泊车安全,建议驾驶员在低速行驶时先将车辆刹停,再点选合适的车位进行泊车。
-
驾驶员选中车位后,未点触“开始泊入”泊车按键就松开刹车的情况下,车辆可能发生溜车,请驾驶员及时接管,确保泊车安全。当驾驶员收到“注意溜车”提醒时,应立即踩下制动踏板接管车辆。
-
APA泊车过程中,建议驾驶员将右脚搭在刹车上,不要踩加速踏板。发生危险时,请随时刹停车辆。驾驶员如果踩加速踏板,车辆会响应驾驶员的干预并退出泊车。请驾驶员务必谨慎执行加速踏板操作,确保安全泊车。
-
在窄车位场景泊车时,若相邻车位的车辆外后视镜处于未折叠状态,使用APA泊车可能发生剐蹭。驾驶员应时刻关注周围环境,必要时及时接管车辆。
-
驾驶员打开APA泊车界面,完成泊车后,若车辆挡位切换为P挡,APA泊车界面会退出。
-
驾驶员应始终保持警惕,密切注意周围可能的各种危险情形,必要时及时人工干预或接管车辆,确保安全驾驶。
-
违反上述操作会影响驾驶员的安全驾驶,可能会引发事故,甚至导致财产损毁、人身伤亡。
在垂直窄车位场景泊车时,当车辆使用车尾泊入或车头泊出有碰撞风险时,APA将自动折叠车辆外后视镜,并通过中控屏提示驾驶员。有如下场景:
-
泊入车位后,外后视镜将保持折叠状态。
-
泊出车位后,APA将在判断与障碍物距离安全的情况下展开外后视镜。
-
在空间足够时,若您需要手动展开外后视镜,驾驶员可在中控屏泊车界面点触右上角
 ,选择“后视镜打开”。
,选择“后视镜打开”。
退出泊车
如需退出APA泊车,可通过如下任一方式退出:
-
转动方向盘。
-
踩下制动踏板,泊车暂停后,切换挡位。
-
踩下制动踏板,泊车暂停后,转动方向盘。
-
踩下制动踏板,泊车暂停后,点触泊车界面上的“退出”。
-
轻按方向盘右侧滚轮(需将该滚轮的功能设置为“智能泊车辅助”)。
-
泊车退出后,驾驶员应及时接管车辆,避免发生危险。
-
当泊车暂停超时APA会退出。
-
踩下制动踏板后切换挡位,APA会退出,车辆保持切换后挡位。
-
踩下制动踏板后转动方向盘,APA会退出,车辆保持当前挡位。
-
将车辆挡位切换至R挡开启APA泊车,挡位切换至D挡且车速大于10km/h,APA退出。
暂停或恢复泊车
暂停APA:泊车过程中,驾驶员可通过踩下制动踏板暂停泊车。
恢复APA:泊车暂停后,点触中控屏界面上的“继续”恢复泊车。
当车辆任一车门打开、遇到障碍物距离持续较近或者驾驶员切换挡位等情况,APA也会暂停。
APA局限性
使用APA泊车时,请驾驶员避免以下行为:
-
视线离开泊车范围。
-
车辆车门、前舱盖、后尾门、充电口盖(仅ADS超阶版)未关闭。
传感器可能无法识别以下障碍物,请驾驶员注意周围环境,及时踩下制动踏板接管车辆,包括但不限于:
-
截面较小的物体,例如细杆、车把手、充电线、水管、铁丝网等。
-
悬空物体,例如悬空广告牌、车位标识牌、充电桩、消防栓、消防阀、货车车尾、车辆后备胎、空调外机、旁车打开的车门等。
-
低矮障碍物,例如花坛、路沿、水泥墩、挡车杆、施工标识牌等。
-
反光的物体,例如玻璃门、地面积水、反光的地坪漆车位等。
-
紧贴车位的障碍物,例如处于感知盲区的方柱、紧贴车位或部分侵入车位的铁门、破损不完整的墙体等。
-
近距离非机动车,例如自行车、三轮车、购物车、手推车、婴儿车、行人(尤其是儿童)、小动物等。
-
其他障碍物,例如圆锥形或表面倾斜的物体、声波高吸收性物体(例如雪、棉质等)。
以下场景请谨慎使用APA,包括但不限于:
-
光线不足或能见度差,例如灯光昏暗、雨/雪/雾天、扬尘/无路灯/暗光/逆光/炫光、斑驳树影下等。
-
车辆处于弯道、陡坡、斜坡、角落、狭窄过道、坑洼的场景(例如沟壑、下水道)、易打滑的路面。
-
台阶等有高度差的路面、存在高度差且无护栏的路面(例如悬崖边、山边、河边、高台、突起的路沿、临街的人行道)。
-
车位狭窄、车位位于道路尽头、车位无框线、或框线混乱、不标准车位(例如弧形车位、前后宽度不一致的梯形车位、较标准车位尺寸偏大或偏小等)。
-
车位内存在坑洼、高度差、低矮障碍物,车位内限位器损坏、轮挡不完整等。
-
自车周围存在近距离缓慢行驶的车辆、或正在泊入、泊出车位的车辆。
-
停车位为机械式立体车位(未订阅ADS高阶包功能时,有此限制)。
当车辆存在以下状况时,会影响APA的正常使用,包括但不限于:
-
使用非原尺寸轮胎或轮胎气压过低。
-
车辆装有雪地防滑链或备用轮胎。
-
方向盘上加装或改装配件,例如安装方向盘套等。
-
车位上的红黄地砖被误识别为地锁,导致车位不释放。
以下场景APA功能无法正常工作,包括但不限于:
-
雷达或摄像头等传感器脏污或被遮挡,如污泥附着、塑料袋遮挡或结冰、积雪。
-
ADS发生故障或需要维修。
-
ADS的性能受限,请参见 辅助驾驶系统通用局限性。
上述限制并未尽述影响APA功能正常工作的全部情形,驾驶员必须时刻关注泊车状况和车辆周边环境,必要时立即暂停泊车,否则可能造成严重财产损坏、人员伤害或死亡。