代客泊车辅助
AVP功能介绍
代客泊车辅助AVP(Advanced Valet Parking Assist)可以在已生成泊车路线的区域内智能规划路线,辅助驾驶员将车辆泊入目标停车位。
AVP支持在车位线清晰、完整,且光照条件良好的平行、垂直、斜列车位使用。泊入停车位时,若目标停车位被占,AVP将漫游寻找其他可用空闲车位并泊入。使用 AVP 前,需要先通过手动记忆生成泊车路线并收藏目标停车位。
对于ADS超阶版,AVP在露天停车场巡航的最高车速约为25km/h,在室内停车场巡航的最高车速约为20km/h。
对于ADS基础版,AVP巡航的最高车速约为20km/h。
使用AVP过程中,需要驾驶员始终在驾驶位并系好安全带。
-
AVP仅在订阅ADS高阶包且驾驶员完整观看AVP安全教学视频并通过考试后可用。
-
对于ADS超阶版,退出AVP导航及界面后,才可以在当前园区内使用车位到车位和泊车代驾。
使用AVP功能时,您可在中控屏和仪表显示屏上查看相关信息:
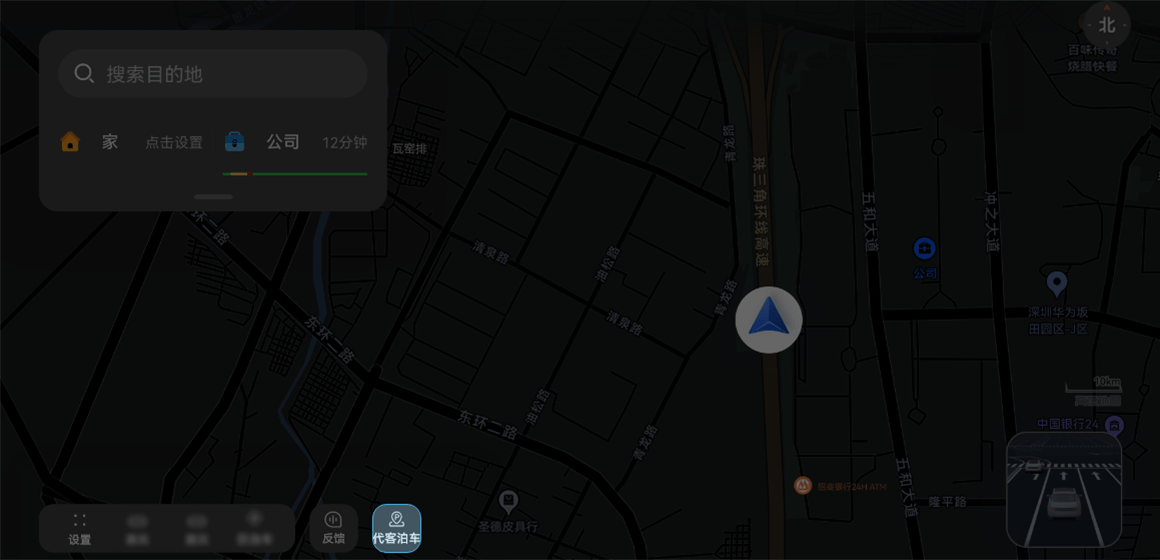
对于ADS基础版,打开ADS APP,点触
 ,根据弹出界面提示记忆路线或使用AVP功能。
,根据弹出界面提示记忆路线或使用AVP功能。
-
本章节提及的部分速度相关信息,仅代表对应功能的自身能力范围。因此使用这些功能时,您务必时刻关注车辆实际速度、严格遵守道路交通安全法规,严禁超速行驶。
-
AVP仅为辅助驾驶功能,不能替代驾驶员的目视检查及环境判断。使用AVP过程中,需要驾驶员始终在驾驶位并系好安全带。
-
驾驶员应始终保持警惕,密切注意周围可能的各种危险情形,必要时及时人工干预或接管车辆,确保安全驾驶。
-
违反上述操作会影响驾驶员的安全驾驶,可能会引发事故,甚至导致财产损毁、人身伤亡。
生成泊车路线
对于经常使用的固定停车场(例如家或公司停车场),当驾驶员首次将车辆驶入停车场时,通过AVP的记忆路线功能,让车辆记录下从入口到停车位的路线,从而生成泊车路线。生成泊车路线后,可使用AVP功能,但ADS基础版仅支持在地下停车场使用。
生成泊车路线使用AVP功能前,您可按以下步骤生成泊车路线:
1.已在车机登录车主账户或车主授权账户。
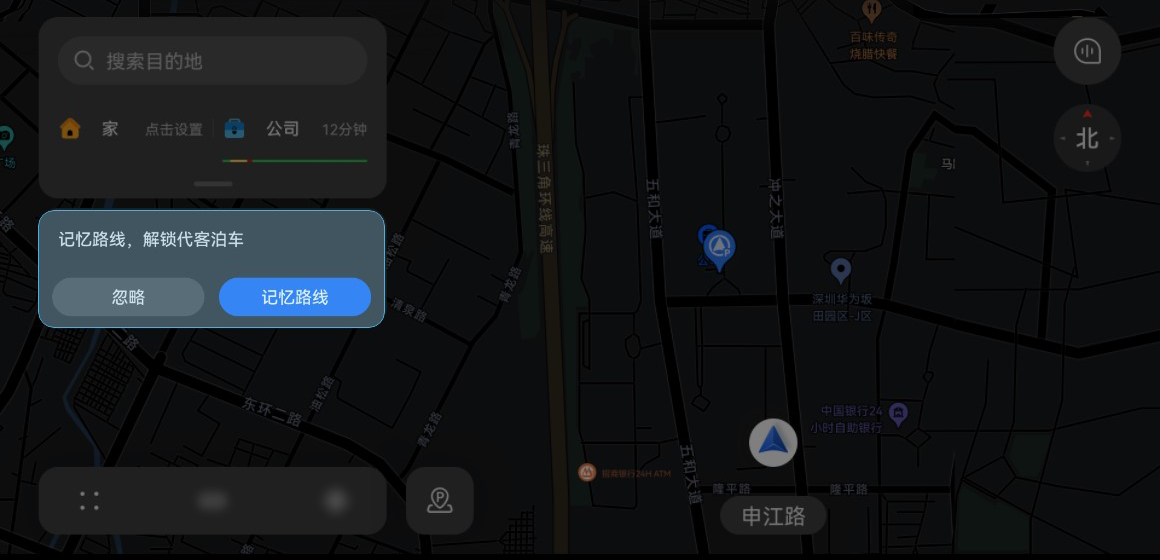
2.打开ADS APP,驾驶车辆进入未生成过泊车路线的停车场,建议车速小于20km/h。对于ADS基础版,当中控屏弹出如上图提示时,点触“记忆路线”记忆泊车路线。
对于ADS超阶版,驾驶员在中控屏点触
 ,在弹出的ADS服务面板中点触“代客泊车”,根据界面提示点触“记忆路线”。
,在弹出的ADS服务面板中点触“代客泊车”,根据界面提示点触“记忆路线”。
系统会标记起点位置并开始记忆行驶路线。
-
对于ADS基础版,若未收到中控屏系统弹窗提示“记忆路线”,驾驶员也可通过在中控屏ADS APP中点触
,根据弹出界面提示点触“记忆路线”记忆泊车路线。
-
对于ADS基础版,若驾驶员在非停车场收到AVP记忆路线的提示,请忽略。
-
对于ADS超阶版,若代客泊车界面未提示“记忆路线”,驾驶员也可以在“设置”界面点触“泊车路线”,根据界面提示点触“记忆路线”记忆泊车路线。若停车场中已存在通过“记忆路线”生成的泊车路线,需要先删除该路线并重新驶入停车场才可重新记忆路线。
-
驾驶员驾驶车辆生成泊车路线时,请依据停车场通行规定安全驾驶。
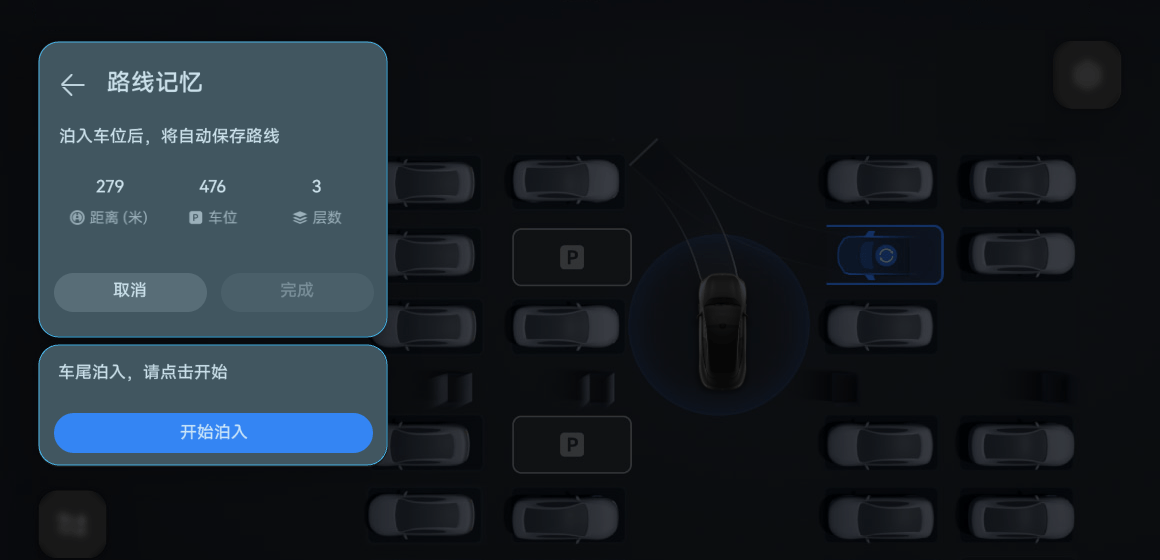
3.行驶至目标车位旁,选择可泊车位后,点触“开始泊入”,将车辆泊入目标车位。泊入完成后,系统将生成泊车路线并收藏当前车位。
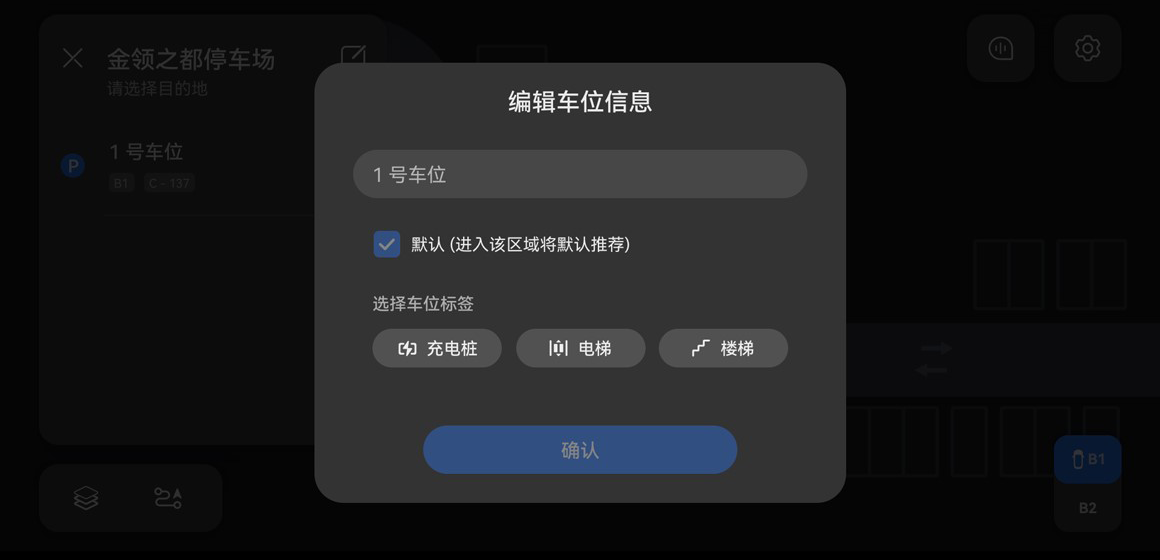
4.(可选)点触“知道了”后,可编辑车位标识信息(如有充电桩、在电梯旁等位置参考信息)。
-
驾驶员也可以驾驶车辆(非ADS辅助驾驶)泊入目标车位,泊入后将车辆切换至P挡,并根据中控屏提示点触“完成”,生成泊车路线,并收藏车位。
-
驾驶员也可在AVP地图上点选一个车位,在打开的“详情”页点触
 后,可编辑车位名称,或将此车位设置为默认车位。
后,可编辑车位名称,或将此车位设置为默认车位。
-
同一停车场内,支持最多收藏5个车位。
-
同一个起点只能生成一条路线。生成泊车路线时,请注意中控屏上的路线上限提醒。
-
驾驶员可在中控屏ADS APP点触
> 设置 > 泊车路线(仅适用于ADS基础版),
> 设置 > 泊车路线(仅适用于ADS超阶版),查看、编辑、删除已收藏的车位及泊车路线。
-
可通过点触车位名称后的
 ,可编辑或删除车位信息。
,可编辑或删除车位信息。
-
可通过点触停车场名称后的
 ,可删除此泊车路线及此路线上所有车位信息。
,可删除此泊车路线及此路线上所有车位信息。
-
代客泊入
对于ADS基础版用户,如果驾驶员已经通过记忆路线生成了泊车路线,后续进入该停车场时,需从已生成泊车路线的入口进入才可以使用AVP代客泊入功能,让车辆沿着系统规划的泊车路线行驶,并泊入目标车位。
激活AVP1.驾驶车辆以低于20km/h的车速进入已生成泊车路线的停车场。
2.对于ADS基础版用户,中控屏将弹出到达默认车位的导航路线。
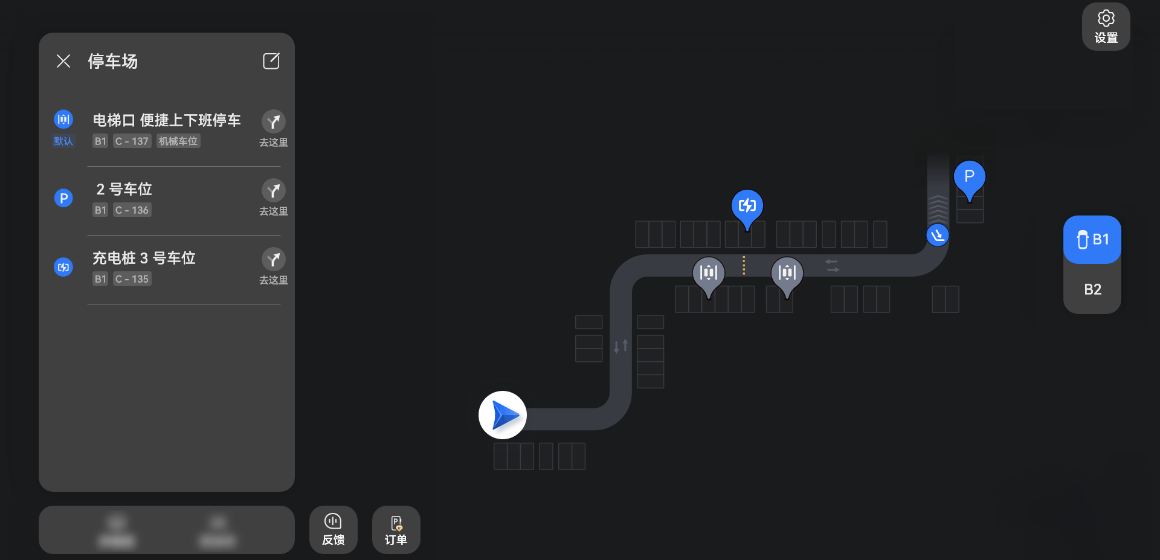
对于ADS超阶版用户,中控屏将弹出到达默认车位的导航推荐卡片,点触“开始导航”。如未收到导航推荐卡片,可点触
> 代客泊车 > 去这里,手动发起到目标车位的导航。
3.对于ADS基础版用户,当仪表显示屏显示
 并收到代客泊车可用提示后。对于ADS超阶版用户,当仪表显示屏显示
并收到代客泊车可用提示后。对于ADS超阶版用户,当仪表显示屏显示
 。此时驾驶员连续向下拨动两次换挡拨杆,即可激活AVP功能。
。此时驾驶员连续向下拨动两次换挡拨杆,即可激活AVP功能。
激活成功后,仪表显示屏上的AVP图标显示为
 (适用于ADS基础版)/
(适用于ADS基础版)/
 (适用于ADS超阶版),自车前方显示蓝色引导线,并伴有提示音。
(适用于ADS超阶版),自车前方显示蓝色引导线,并伴有提示音。
4.激活AVP后,如需更换停车位,请参考如下步骤:
a.点触中控屏左下角
 退出当前默认车位导航。
退出当前默认车位导航。
b.在中控屏车位选择界面选择其他可泊车位,点触“去这里”发起到新的目标车位导航。
c.当仪表显示屏显示
(适用于ADS基础版)/
(适用于ADS超阶版)时,驾驶员连续向下拨动两次换挡拨杆,激活AVP功能。
5.激活AVP功能后,车辆将沿着系统规划的泊车路线行驶,并泊入目标车位。
若选择的车位被占时,车辆将寻找其他空车位。如果找不到合适的停车位或行驶至记忆路线中的断头路,AVP功能将退出。
-
激活AVP功能时,请驾驶员始终在驾驶位并系好安全带,否则AVP功能无法激活。
-
在使用AVP泊入或泊出车位过程中,驾驶员踩加速踏板,AVP会暂停。请驾驶员谨慎执行干预加速踏板操作,确保安全泊车。
-
使用AVP巡航过程中,若遇到狭窄通道、拥堵闸机等不易通行的场景,系统可能会适当倒车调整行车轨迹后再尝试重新通行。
调节目标车速
在使用AVP行驶过程中,驾驶员也可以按以下任一方式手动调整AVP巡航的目标车速:
-
向上或向下拨动方向盘右侧滚轮手动调整AVP巡航的目标车速。露天停车场道路可调节的目标车速范围为5km/h~25km/h,室内停车场可调节的目标车速范围为5km/h~20km/h。
-
对于ADS超阶版车型,踩加速踏板可将AVP巡航车速调整至最高50km/h。踩加速踏板至实时车速不高于50km/h后,直接松开加速踏板,目标车速调节为AVP巡航的最高限速。
-
对于ADS基础版车型,踩加速踏板可将AVP巡航车速调整至最高35km/h。踩加速踏板至实时车速不高于35km/h后,直接松开加速踏板,目标车速调节为AVP巡航的最高限速。
退出AVP
使用AVP过程中,您可以通过以下方式主动退出AVP:
-
踩下制动踏板。
-
转动方向盘。
-
向上拨动换挡拨杆。
-
点触中控屏左下角
,并在二次确认弹窗中点触“退出导航”。
退出AVP时,仪表显示屏AVP图标会消失,同时伴有提示音。
退出AVP后,如果仪表显示屏上仍显示
(适用于ADS基础版)/
(适用于ADS超阶版),并提示“代客泊车可用”,您可以连续向下拨动两次换挡拨杆重新激活AVP功能。
除上述情形外,如下情况也会致使AVP功能将退出:
-
AVP泊车过程中车门、安全带、前舱盖、后尾门、充电口盖(仅适用于ADS超阶版)被打开。
-
AVP过程中自车跟随前车停止等待的时间过长。
-
对于ADS超阶版车型,AVP巡航过程中驾驶员踩加速踏板,至车速大于50km/h。
-
对于ADS基础版车型,AVP巡航过程中驾驶员踩加速踏板,至车速大于35km/h。
AVP功能退出后,请您立即接管控制车辆,确保安全。
异常处理
当仪表显示屏显示
 (适用于ADS基础版)/
(适用于ADS基础版)/
 (适用于ADS超阶版)时,表示AVP功能激活失败。此时,请检查车门、安全带、后尾门、机舱盖、充电口盖(仅适用于ADS超阶版)等是否处于正常状态后重试。
(适用于ADS超阶版)时,表示AVP功能激活失败。此时,请检查车门、安全带、后尾门、机舱盖、充电口盖(仅适用于ADS超阶版)等是否处于正常状态后重试。
AVP泊车过程中,如遇行人、周边车辆、障碍物等情况车辆可能会被卡停,驾驶员请根据系统提示及时接管。
当中控屏通过图标、文字或语音播报提醒驾驶员立即接管时,请立即接管以确保行车及泊车安全。禁止过度依赖ADS发出的接管提醒来判断和决定接管的时机。驾驶员应始终专注驾驶,注意车辆周围情况,必要时及时接管。
AVP局限性
当遇到以下危险场景时,系统可能无法及时准确处理,驾驶员需根据实际场景及时暂停或接管车辆,防止发生碰撞风险,包括但不限于:
-
在经过路口转弯、T形路口、十字路口、停车场出入口时。
-
前方车辆正在泊入或泊出停车位。
-
前方车辆正在或突然打开车门。
-
旁车突然快速切入。
-
窄车道会车。
-
存在护栏、闸机等异形障碍物(本条仅适用于ADS基础版车辆)。
以下场景AVP可能无法如预期的方式,包括但不限于:
-
当行驶路线存在狭窄弯道、过大弯道时,即使已生成泊车路线,车辆仍可能无法顺利通过。
-
使用AVP时,车辆可能会偏离正常车道行驶,请驾驶员及时关注路况,确保行驶安全。
-
受限于定位识别精度,AVP泊车界面可能会异常退出,请更换停车场入口后重试。
-
受限于定位识别精度,驶入停车场时,中控屏可能偶尔不弹出“记忆路线”提示,如发生,请更换停车场入口后重试。
-
(本条仅适用于ADS基础版车辆)受限于定位识别精度,驶入停车场时,中控屏可能偶尔不弹出“记忆路线”提示,如发生,请更换停车场入口后重试。
-
记忆路线后,如有施工改道、临时封闭等无法通行的场景时,将无法使用当前已生成的泊车路线(本条仅适用于ADS基础版车辆)。
传感器可能无法识别以下障碍物,请驾驶员注意观察周围环境,及时踩下制动踏板接管车辆,包括但不限于:
-
截面较小的物体,例如细杆、车把手、充电线、水管、铁丝网等。
-
悬空物体,例如悬空广告牌、车位标识牌、充电桩、消防栓、消防阀、货车车尾、车辆后备胎、空调外机、旁车打开的车门等。
-
低矮障碍物,例如花坛、路沿、水泥墩、挡车杆、施工标识牌、倒地的标识牌、铁栅栏等。
-
反光的物体,例如玻璃门、地面积水、反光的地坪漆车位等。
-
紧贴车位的障碍物,例如处于感知盲区的方柱、紧贴车位或部分侵入车位的铁门、破损不完整的墙体等。
-
近距离非机动车,例如自行车、三轮车、购物车、手推车、婴儿车、行人(尤其是儿童)、小动物等。
-
其他障碍物,例如圆锥形或表面倾斜的物体、声波高吸收性物体(例如雪、棉质等)。
以下场景请谨慎使用AVP,包括但不限于:
-
光线不足或能见度差,例如灯光昏暗、雨/雪/雾天、扬尘/无路灯/暗光/逆光/炫光、斑驳树影下等。
-
车辆处于弯道、陡坡、斜坡、角落、狭窄过道、坑洼的场景(例如沟壑、下水道)、易打滑的路面。
-
台阶等有高度差的路面、存在高度差且无护栏的路面(例如悬崖边、山边、河边、高台、突起的路沿、临街的人行道)。
-
车位狭窄、车位位于道路尽头、车位无框线、或框线混乱、不标准车位(例如弧形车位、前后宽度不一致的梯形车位、较标准车位尺寸偏大或偏小等)。
-
车位内存在坑洼、高度差、低矮障碍物,车位内限位器损坏、轮挡不完整等。
当车辆存在以下状况时,会影响AVP的正常使用,包括但不限于:
-
使用非原尺寸轮胎或轮胎气压过低。
-
车辆装有雪地防滑链或备用轮胎。
-
方向盘上加装或改装配件,例如安装方向盘套等。
-
车位上的红黄地砖被误识别为地锁,导致车位不释放。
以下场景AVP功能无法正常工作,包括但不限于:
-
雷达或摄像头等传感器脏污或被遮挡,如污泥附着、塑料袋遮挡或结冰、积雪。
-
ADS发生故障或需要维修。
-
ADS的性能受限,请参见 辅助驾驶系统通用局限性。
上述限制并未尽述影响AVP功能正常工作的全部情形。驾驶员必须时刻关注泊车状况和车辆周边环境,必要时立即暂停泊车,否则可能造成严重财产损坏、人员伤害或死亡。
-
AVP功能仅为辅助功能,不能完全替代驾驶员的驾驶行为,无法保证在出现故障或紧急情况时能提前或及时发出接管提醒。禁止过度依赖ADS发出的接管提醒来判断和决定接管的时机。
-
因ADS无法准确识别园区或地库的单行道,可能会存在逆行风险。驾驶员需确认车辆按照停车场的交通指示行驶,切勿因逆行造成与其他车辆、行人或骑行者发生碰撞,必要时及时人工干预或接管车辆,确保安全驾驶。
-
请驾驶员始终专注驾驶,务必注意周围情况、留意仪表弹出的实时提示并随时准备采取安全措施,必要时及时接管,确保安全驾驶。
-
驾驶员应始终保持警惕,密切注意周围可能的各种危险情形,必要时及时干预或接管车辆,确保安全驾驶。
-
违反上述操作会影响驾驶员的安全驾驶,可能引发事故,甚至导致严重的财产损失、人身损害甚至死亡。